产品概述
库卡 KR16L6机器人由肘节式结构的KR6L6型机器人本体,KRC2控制柜、示教控制器KCP组成;铝合金机器人本体、高速运动曲线的动态模型优化,使得库卡机器人的加速性能比其它普通机器人高出25%,有利于提高系统寿命、优化工作节拍。
性能特点
KR16L6 机器人
低负荷机器人的长臂专家
大大增加了低负荷应用下设备可达性
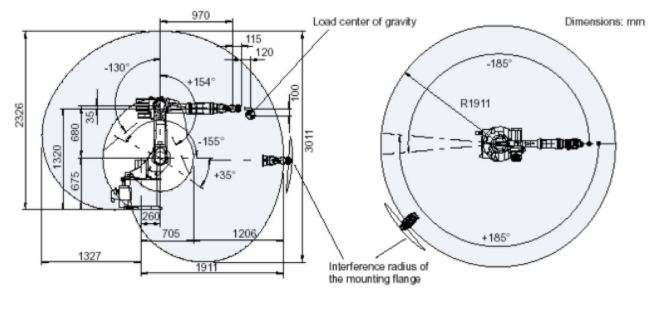
技术参数
结 构 | 垂直多关节形(6自由度) | |
单轴最大 | 轴1(回旋) | ±185° |
轴2(上臂) | +35°,-155° | |
轴3(下臂) | +154°,-130° | |
轴4(手腕回旋) | ±350° | |
轴5(手腕摆动) | ±130° | |
轴6(手腕回转) | ±350° | |
单轴最大 | 轴1 | 156° /s |
轴2 | 156° /s | |
轴3 | 156° /s | |
轴4 | 335° /s | |
轴5 | 335° /s | |
轴6 | 647° /s | |
工作半径 | 1911 mm | |
重复定位精度 | ±0.1mm | |
负载质量 | 轴6最大荷载6 kg | |
装机容量 | 6 kW | |
重量 | 240 kg | |
安装方式 | 直立/倒挂 | |
防护等级 | IP54 | |
详细技术参数请参见技术图示 | ||